Yingwei Noah Song
PhD student at University of Arizona. yingwei [at] arizona [dot] edu

Module 137, Rift Station
42 Spiral Gate
Andromeda Galaxy, 31400
Hi there, I am a first year PhD student in student in Electrical and Computer Engineering at the University of Arizona, advised by Prof. Huanrui Yang. My research is currently in an exploratory phase, but I am broadly interested in 3D reconstruction, diffusion-based generative models, video synthesis, and efficient learning methods. I am especially curious about how to build semantically meaningful and computationally efficient generative systems that can handle complex spatial and temporal data.
Before coming to UArizona, I completed my M.S. in Computer Science at Brown University in 2025, where I worked with Prof. James Tompkin on neural rendering and representation learning using NeRF. Before that, I received my B.S. from the University of Wisconsin–Madison in 2023, double majoring in Computer Science and Data Science, with a minor in Math.
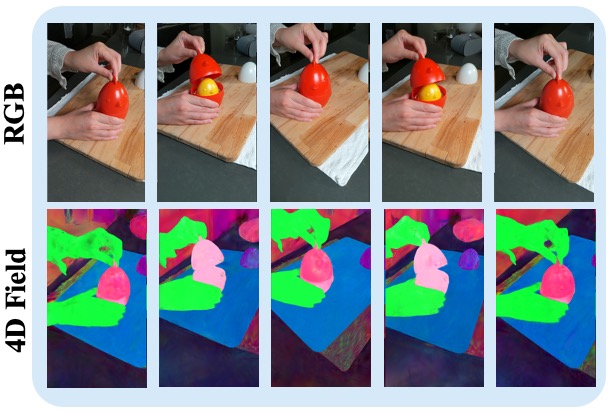
In the summer of 2024, I was a research intern at the Harvard Visual Computing Lab, where I collaborated with Prof. Hanspeter Pfister and Dr. Wanhua Li on 3D Gaussian Splatting with language-based supervision.
In 2025, I interned at Hedra AI, working with Hongwei Yi on diffusion-based video generation and efficient generative modeling. I gained HPC experience with k8s, Airflow, and developed a custom Slurm-based orchestration system to streamline large-scale preprocessing. I drove the creation of a pipeline that filtered raw videos into training-ready datasets and embeddings, producing over 10 million clips—a milestone I am especially proud of.
Beyond research, I am especially fond of Siamese cats and rabbits.
A quote that resonates with me is from William T. Freeman: “Slow down to speed up.”
news
| Jan 15, 2016 | A simple inline announcement with Markdown emoji! |
|---|---|
| Nov 07, 2015 | A long announcement with details |
| Oct 22, 2015 | A simple inline announcement. |
latest posts
| Mar 26, 2025 | a post with plotly.js |
|---|---|
| Dec 04, 2024 | a post with image galleries |
| May 14, 2024 | Google Gemini updates: Flash 1.5, Gemma 2 and Project Astra |